Inside SLAM: The Science Behind Robotic Navigation
An in-depth exploration of Simultaneous Localization and Mapping (SLAM), covering algorithms, techniques, and real-world robotic navigation systems.


About me
I'm Umer Ghafoor, a Computer Vision & Robotics Engineer focused on transforming perception into action through real-time vision systems, embedded control, and edge AI optimization. I build scalable robotics solutions that operate in dynamic real-world environments — currently leading AI work at BeetleOps on an end-to-end computer vision product. I also enjoy expressing myself through art and design. Guided by 'Unfold Your Own Myth,' I believe in self-discovery and continuous learning.
My skills
I work across real-time computer vision, edge AI optimization, ROS2 robotics, IoT, and full-stack application development — from embedded firmware on Jetson/ESP32 up to Next.js dashboards.






















My Works
I have worked on diverse projects, including predictive analytics to automated systems. Here are some of my recent projects.

My Artwork
Art is my way of expressing creativity beyond code. I enjoy creating digital illustrations, concept art, and visual designs that showcase my artistic vision. Here's a glimpse of my artwork - each piece represents my passion for visual storytelling and creative expression.
Latest Posts
Discover my latest thoughts on technology, robotics, programming, and personal experiences. I share insights from my projects, tutorials, and reflections on my journey in computer science.
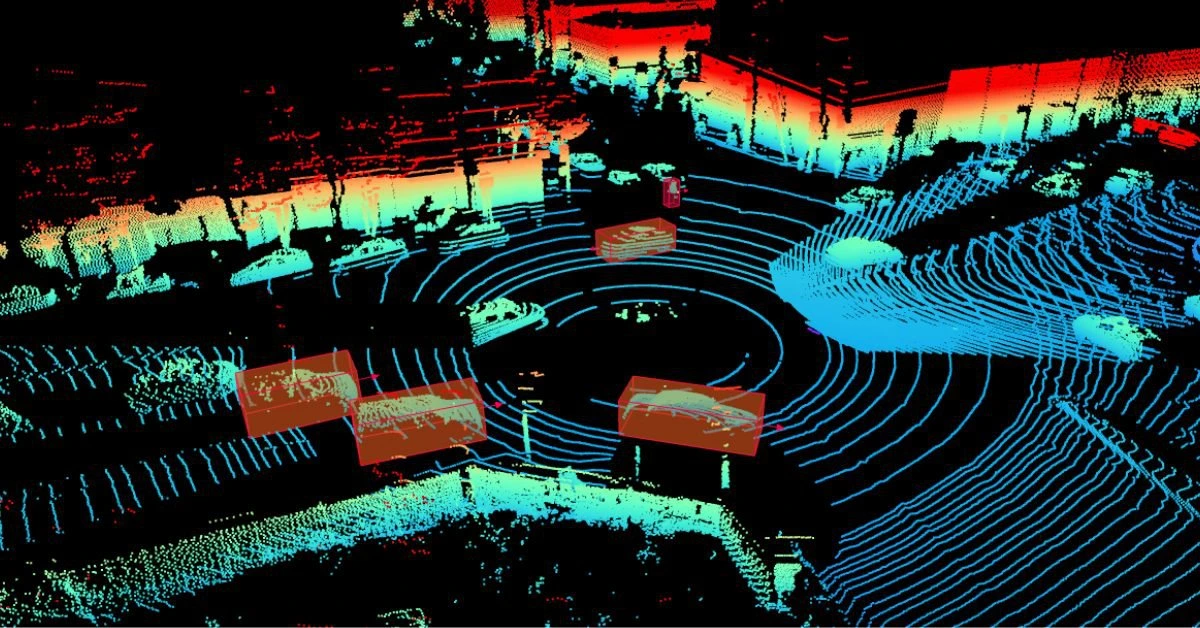
An in-depth exploration of Simultaneous Localization and Mapping (SLAM), covering algorithms, techniques, and real-world robotic navigation systems.
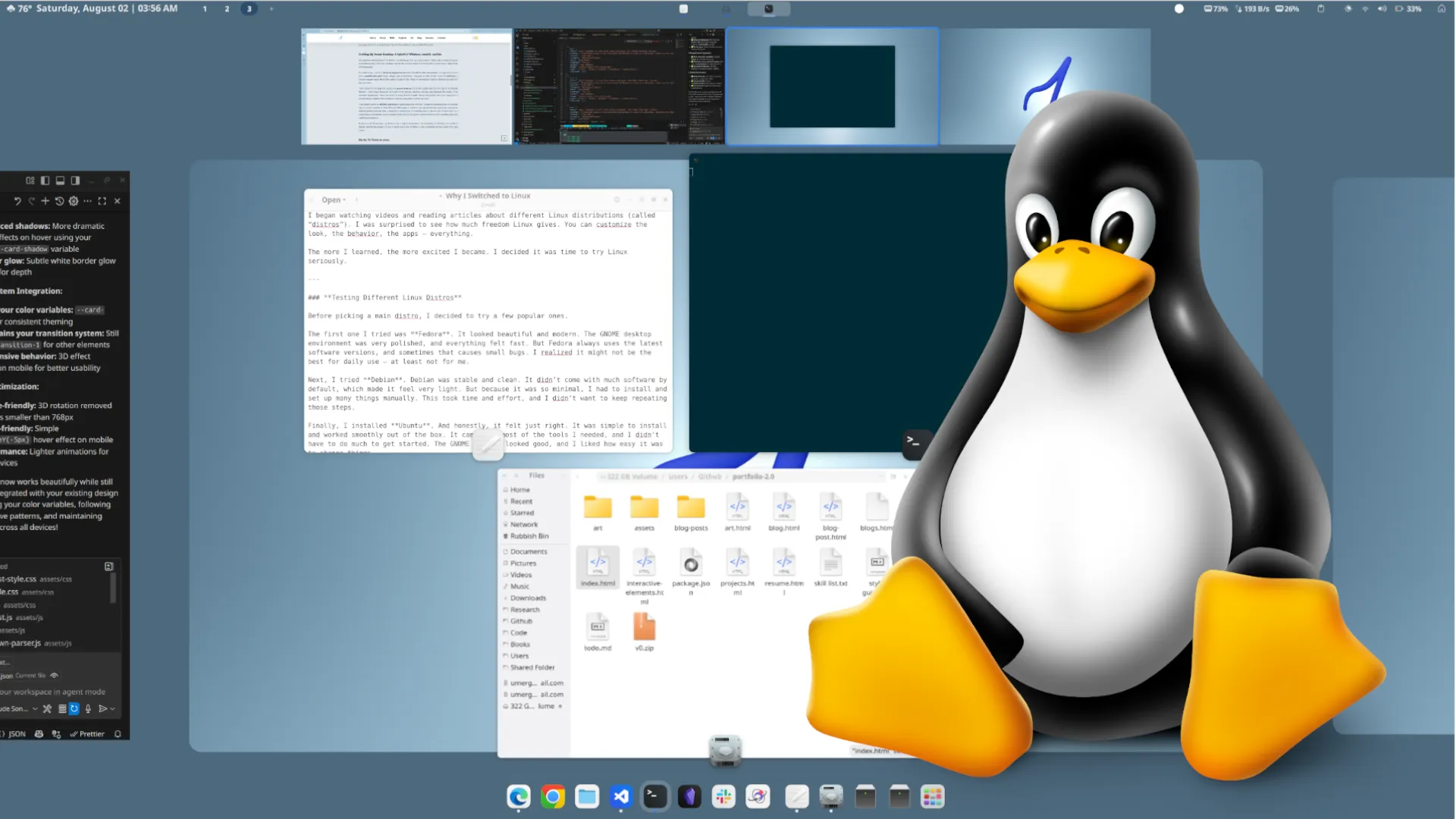
A detailed account of my transition from Windows to Linux as a developer.

Understanding how machines perceive 3D through passive and active methods.
Showcase your coding activity like a pro with GitHub-WakaTime Stats Cards.
Contact
Get in touch and let me know how i can help. Fill out the form and i’ll be in touch as soon as possible.